J’ai introduit le projet Geckrobot précédemment (ici). Je vais développer dans cet article plus en détail le fonctionnement d’une patte :
- Le concept initial.
- Les modèles cinématiques direct et inverse qui permettrons de piloter les pattes dans un systèmes de coordonnées cartésiennes (X, Y, Z).
- Le modèle mécanique qui permettra de dimensionner les servomoteurs.
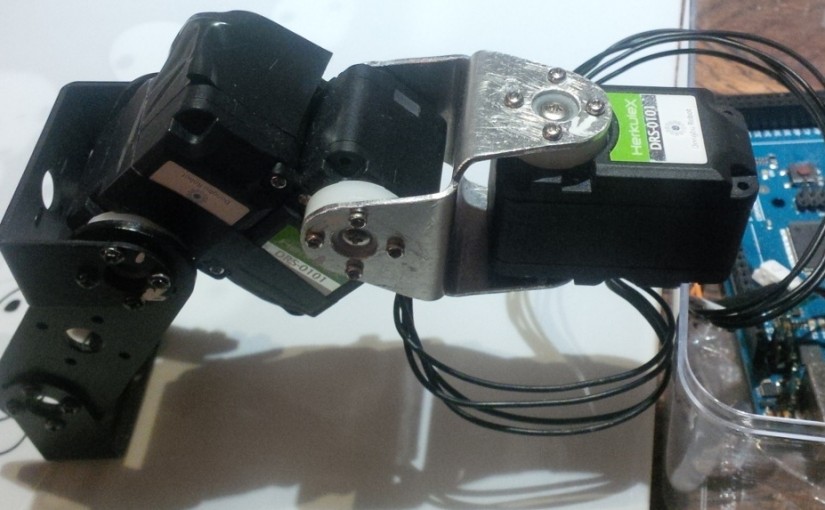
- Le premier prototype de patte.
Continuer la lecture de Geckrobot : Concept et modélisation d’une patte