1. Pour les francophones
Je reçois de temps à autres des demandes d’aide pour utiliser la librairie. Je suis content qu’elle vous serve ! En général vous me contactez quand vous rencontrez des problèmes… et c’est normal.
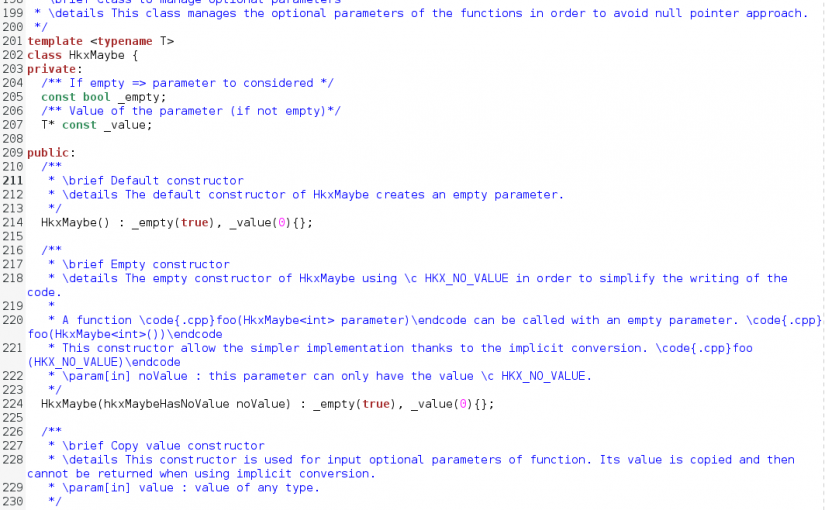
J’écris cet article pour essayer de vous aider à identifier pourquoi ça ne fonctionne pas. Et la classe qui va vous aider dans cette démarche est HkxPrint. La documentation de HkxPrint nous explique que :
Continuer la lecture de HerkuleXLib: Comment débugger ? / Howto debug?This class manages the print of the messages (error, warning and info) for a serial monitor.