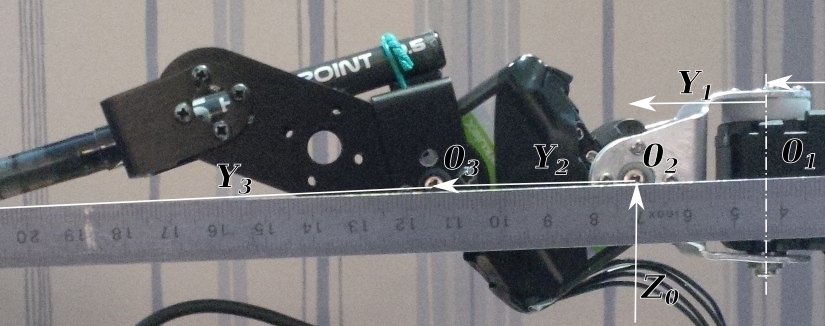
Dans ma quête d’améliorer mon pilotage de patte, il me fallait des moyens de fabrication plus importants. J’ai donc franchi le pas-de-porte du Fablab Coh@bit situé au milieu des IUT de Talence (région bordelaise). J’ai été très bien accueilli même s’il m’a fallu négocier un petit peu pour avoir le droit d’utiliser des moyens d’usinage. Une formation plus tard, me voilà aux commendes d’une CNC (marque Charly). Ça me rappelle mes cours de productique du lycée !
Continuer la lecture de Premiers pas au Fablab (Coh@bit à Talence)